Initial sketch made to pitch the idea of a commercial underwater vehicle.
The project started with an idea I got together with my dad: Wouldn't it be cool to use existing RC technology to make an underwater drone that could deliver an experience that feels like swimming like a fish? Based on this, I made a pitch for Robor Electronics that proposes a submersible that makes use of hydrodynamic lift. It would behave like an upside-down airplane, giving the user the experience of "flying" through the water. This spark started an exploration of new underwater possibilities based on drone technology.
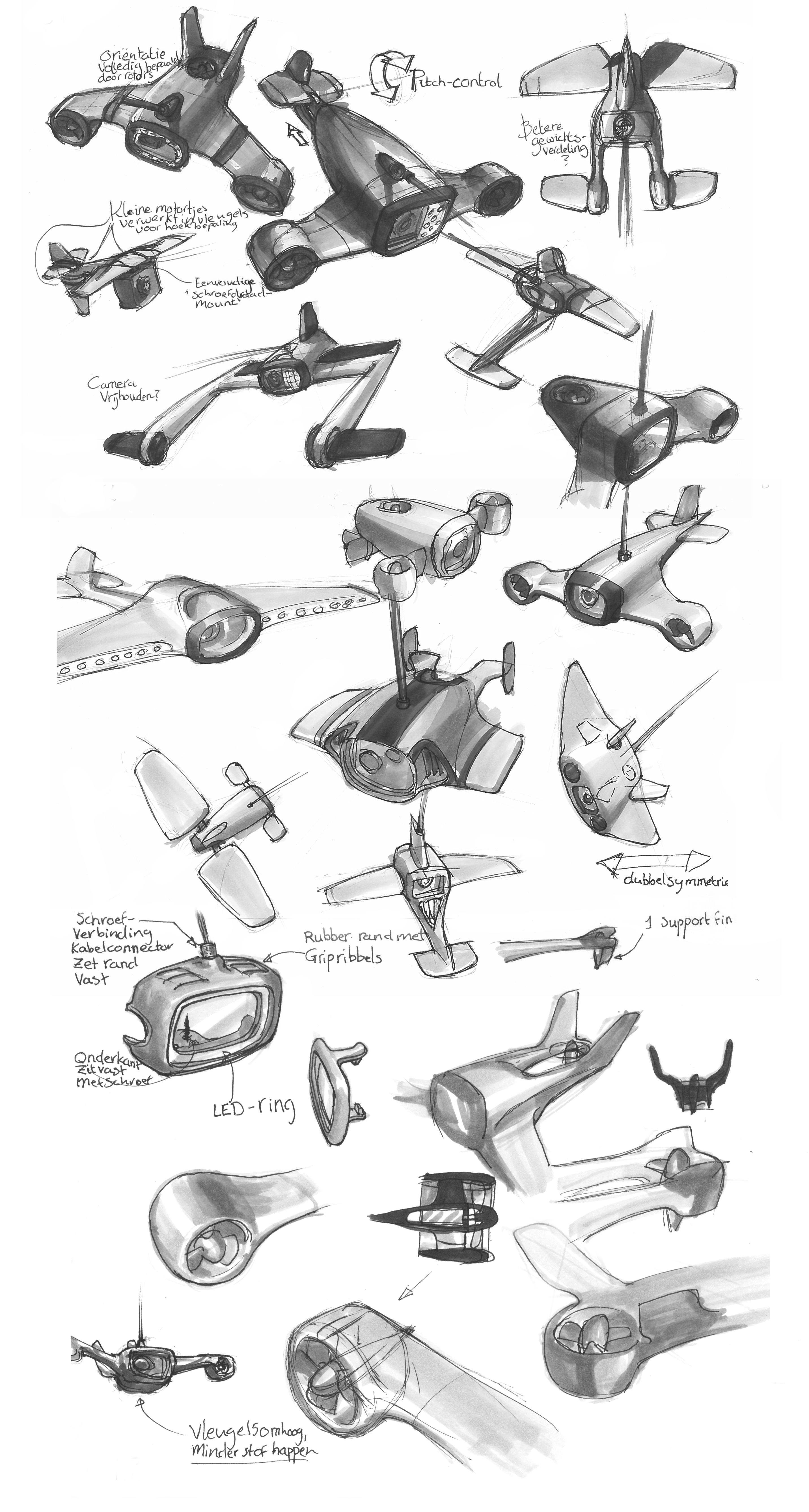
A selection of the many possibilities that were explored.
After researching possible markets and current solutions, a broad range of solution ideas were explored and sketched out. One of the challenges was providing fast and reliable communication, as we wanted to establish a live video feed, but wireless communication was not possible since only low frequency signals can travel far enough. Different solutions were considered, such as a surfacing antenna buoy and local interpretation of the footage, so that vehicle could send only coordinates of points of interest, resulting in a lighter data stream which could be translated to a graphic representation of the vehicle’s environment on the recieving end.
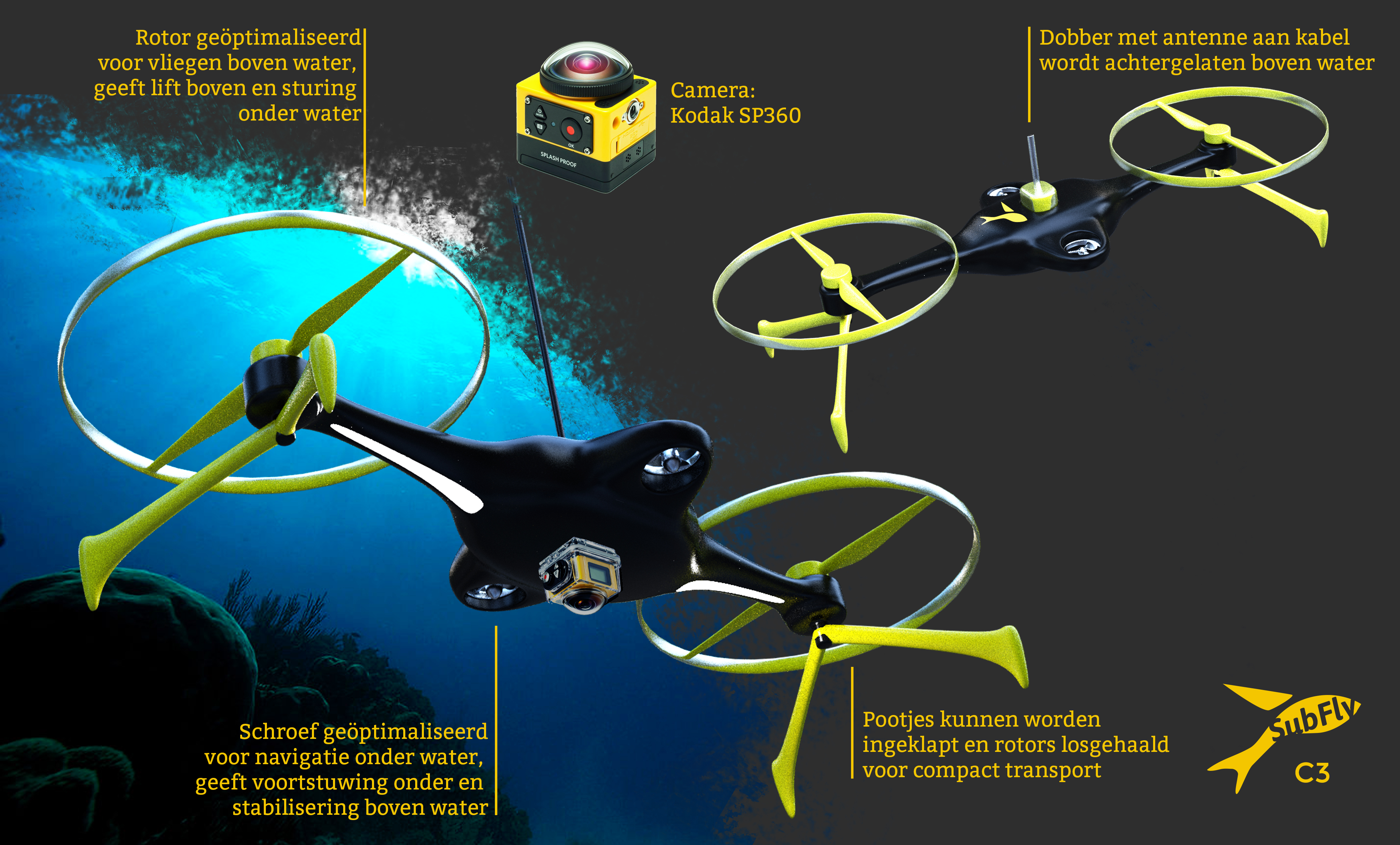
Concepts
In this concept, the size could be reduced by making use of the batteries of the flying drone, while the connection can also be used for communication and a live video feed.
The second concept is comparable to the first, with the inclusion of rotatable fins for more manoeuvrability at the cost of a more complex system.
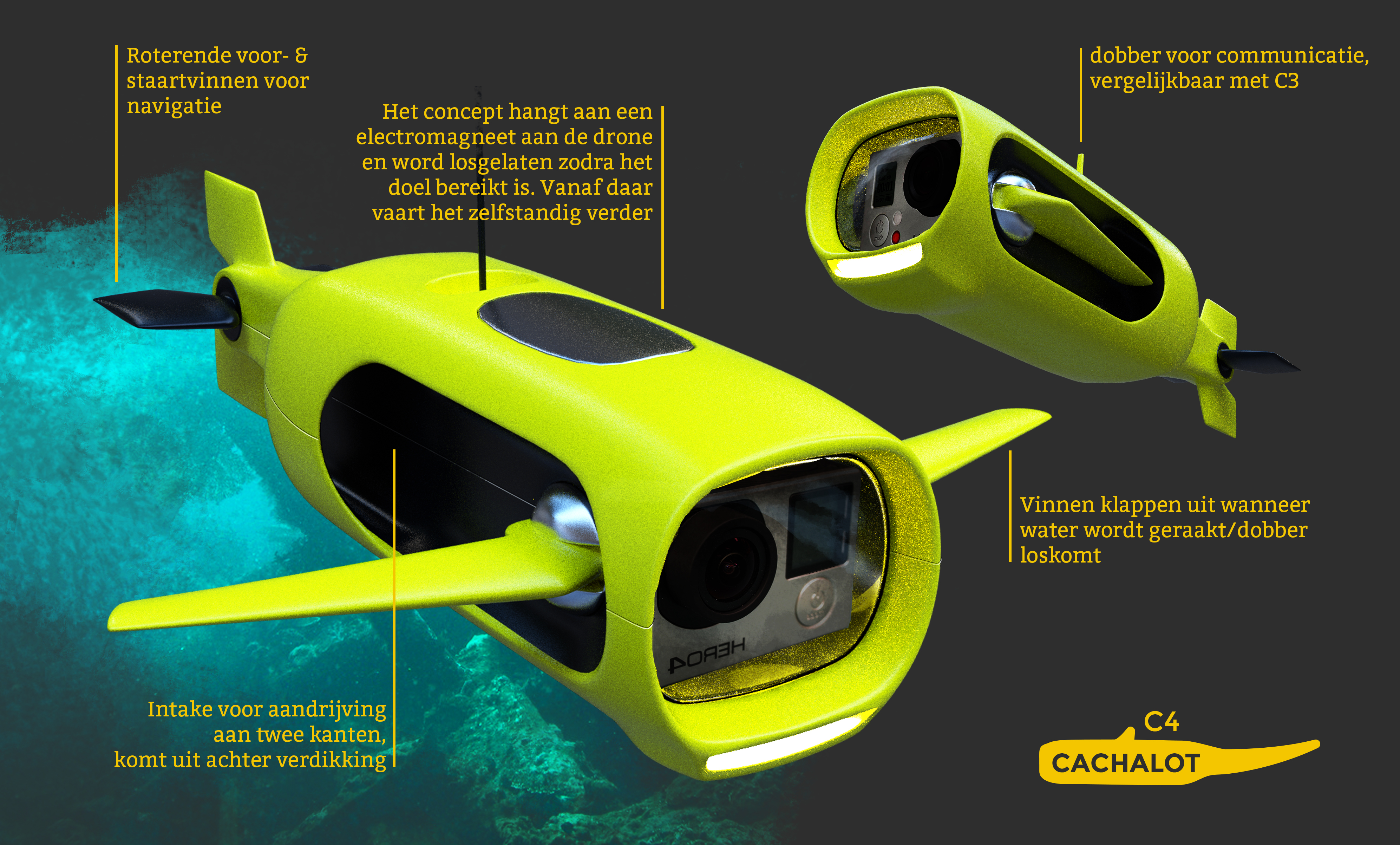
This concept encompasses an amphibious drone, meaning that it should function both underwater and in the air. A 360*-camera in combination with VR-goggles are used to replace a complex gimbal.
A fully stand-alone ROV was also considered, which could be dropped like a small “bomb”, propelled by two water jets and controlled with adjustable fins.

The initial prototype, while very crude, worked as a functional proof-of-concept, and provided important feedback.
The ideas are filtered and merged into a couple of concepts. The different concepts solved problems in different ways. Fast deployment for example could be realised by lowering the vehicle from a quadcopter or floating dock/boat, making the vehicle amphibious or by catapulting the vehicle.
We decided to continue with a combination of the first two concepts. Robor already developed a powered spool for a lightweight tether that could be mounted to the Matrice 100 quadcopter [link]. Using that as a starting point, efforts can be redirected to the development of the submersible vehicle itself. This resulted in a functional prototype for a small remotely operated camera vehicle.
The concept is updated based on further conversations with Robor and feedback from testing the prototype. The rotor wings are the only custom structural part. Its symmetry means that only one mold is needed for all three wings. Since the initial batch size would be low, this drives down production costs per unit significantly. Using resources from the launch/support vehicle, the solution can be made even more compact and cost-efficient. Without the need for a battery on board, the entire control system can be cramped in the back of an extended GoPro-casing, together with the camera itself.

Updated concept, integrating feedback from prototype tests and optimised for small-batch manufacturing.
More drones
Read more about some of the parts that I designed for the platform.
 Mark Zwart
Mark Zwart